
Is this Life?
(working project)

Project description
“Is this Life?” is research into what defines
living entities and the relationship between the audience and robots based on a
swarm of robotic spheres that perform choreographies in space. They react to
each other and to the audience present by movements based on the rules of the
Boid algorithm by Craig Reynolds.
“Is this Life?” is a distributed monolith, a visually uniform constellation of perfectly spherical porcelain objects, a sculpture that is permanently searching its position in relation to the observer, but not only being observed, but also interacting, and confronting the audience. Monolithic in its presence, but not in its form, it obscures the underlying mechanisms, inviting the audience to uncover its principles and discover its inner workings.
The interplay of the spheres with each other and the audience places viewers in an endlessly feedbacking system of information. Robots and audience alternately become receivers, transmitters, or the data itself. This system highlights the adaptive and symbiotic relationships between humans and technology.
It questions the relation between living and non-living as an obsolete distinction, an arbitrary definition, that changes over time. In reality, we have an exponentially increasing number of non-living entities interacting with and defining our daily reality. This seeks closer attention and more speculative studies.
This is precisely what “Is this Life?” is about. It is a continuous research project spanning over time, an adaptive system based on natural principles, showing emergent behavior and different forms of communication and interaction. Not only seeking its place among the people, but also making the audience question their place inside a human ecosystem, one increasingly being populated with other life systems.
The shape of the sphere and the material clearly belong to something inorganic and non-living, and in its form ancient, beyond time, but the behavior and the movement are organic and life-like. This creates a contrast; it implies the building blocks and represents principles surrounding us, as something beyond our daily experience and universal. Perfect spheres are rarely found in nature but nevertheless appear in more elusive forms, like atoms, bubbles, and water drops to megastructures like planets and stars. This gives the robots a universal, almost unreal shape, making them hover on the ground, moving but seemingly standing still. The principles of their movement and their character are unclear.
The size and material of the spheres are carefully selected in relation to human size and perception, and our most fundamental environment. The shells are made from ceramics, used for thousands of years in human history, the most fundamental material, coming from erosion of rocks under the influence of elements from our environment, but at the same time highly technological, used in high precision mechanics and space shuttles due to its highly specific and versatile properties.
Despite being a technologically rich installation, “Is this Life?” carefully hides its complexity. The algorithm and the robots, hosted within smooth porcelain shells, point to more fundamental organizational laws rather than showcasing themselves.
The spheres produce a rolling sound, resonating through space. Their surface reflects and bends light, creating an impression of a perfect virtual space with pronounced physicality, akin to entering a hyper-realistic simulation.
“Is this Life?” is a distributed monolith, a visually uniform constellation of perfectly spherical porcelain objects, a sculpture that is permanently searching its position in relation to the observer, but not only being observed, but also interacting, and confronting the audience. Monolithic in its presence, but not in its form, it obscures the underlying mechanisms, inviting the audience to uncover its principles and discover its inner workings.
The interplay of the spheres with each other and the audience places viewers in an endlessly feedbacking system of information. Robots and audience alternately become receivers, transmitters, or the data itself. This system highlights the adaptive and symbiotic relationships between humans and technology.
It questions the relation between living and non-living as an obsolete distinction, an arbitrary definition, that changes over time. In reality, we have an exponentially increasing number of non-living entities interacting with and defining our daily reality. This seeks closer attention and more speculative studies.
This is precisely what “Is this Life?” is about. It is a continuous research project spanning over time, an adaptive system based on natural principles, showing emergent behavior and different forms of communication and interaction. Not only seeking its place among the people, but also making the audience question their place inside a human ecosystem, one increasingly being populated with other life systems.
The shape of the sphere and the material clearly belong to something inorganic and non-living, and in its form ancient, beyond time, but the behavior and the movement are organic and life-like. This creates a contrast; it implies the building blocks and represents principles surrounding us, as something beyond our daily experience and universal. Perfect spheres are rarely found in nature but nevertheless appear in more elusive forms, like atoms, bubbles, and water drops to megastructures like planets and stars. This gives the robots a universal, almost unreal shape, making them hover on the ground, moving but seemingly standing still. The principles of their movement and their character are unclear.
The size and material of the spheres are carefully selected in relation to human size and perception, and our most fundamental environment. The shells are made from ceramics, used for thousands of years in human history, the most fundamental material, coming from erosion of rocks under the influence of elements from our environment, but at the same time highly technological, used in high precision mechanics and space shuttles due to its highly specific and versatile properties.
Despite being a technologically rich installation, “Is this Life?” carefully hides its complexity. The algorithm and the robots, hosted within smooth porcelain shells, point to more fundamental organizational laws rather than showcasing themselves.
The spheres produce a rolling sound, resonating through space. Their surface reflects and bends light, creating an impression of a perfect virtual space with pronounced physicality, akin to entering a hyper-realistic simulation.

Introduction
Reality
is defined by physical/natural laws (Greek: physis=nature) like the Newton’s
law of gravitation, that can be abstracted into mathematical formulas/codes/principles.
One of these principles is self-organization and the area of swarm
intelligence.
Swarm
refers to loosely structured cluster of interacting agents. Swarm structure
arises from very simple rules that the agents follow. Through these rules a
complex behavior emerges. The individuals in the swarm/flock are autonomous
agents. They have a limited ability to perceive the environment - an agent can
observe other agents only if they are within a limited distance. They
independently process the information received from the environment and make
decisions based on it. There is no leader to define the behaviour of the group. Autonomous
agents create robust systems that can easily adapt to changes in their
environment.
Complex behaviour emerges from three simple steering behaviours:
Complex behaviour emerges from three simple steering behaviours:
- Alignment - adjusting the direction and amount of speed
-
Cohesion - forming groups with nearby individuals
-
Separation - avoiding crowds and maintaining space
Its organization can’t be interpreted by observing an individual agent and only occurs through the interaction between them. It is considered a decentralized self-organized system. Swarm intelligence systems have an ability to act in a coordinated way, without anyone controlling them, externally or internally. It can be also used to describe social behavior of humans.
One of the more popular algorithms used for swarming is Boid algorithm following Rainold rules. Craig Reynolds is an American computer engineer specialised in computer graphics and modelling of artificial life. Most of his work is based on procedural computer programs that simulate the behaviour of large groups of animals. In 1986, he created a computer model for animation movements of animals in flocks (such as birds or fish). He called these generic units used as autonomous agents boids (bird-oid object, "bird-like. object”).
In the field of swarm robotics, tasks like mapping or foraging make use of boids’ simulations. This is because these tasks lend themselves well to be solved by a group of small robots. The installation Is this Life? will use the same principles to create intricate interactions between robots and the audience.
In this short statement I am talking about emergence and briefly reflecting on the title
In this clip I am explaining some of the intentions behind the project, the importance of the physicality and the use of technology
Marko Križmančić from LARICS Lab examining localisation and control he developed for the “Is this Life?” project
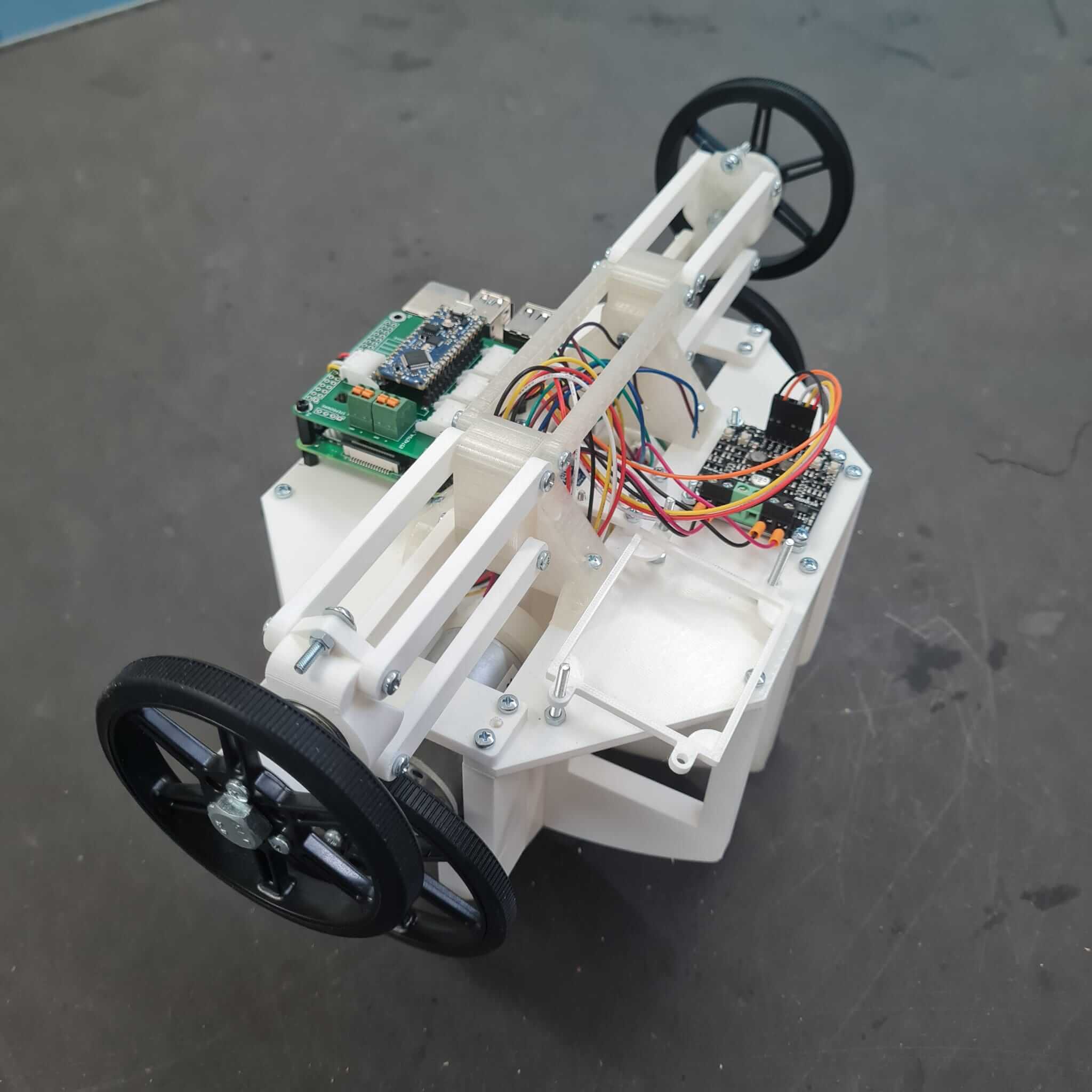
Max Mahieu from TU Delft describing his involvement in building the hardware part of the robot
In this clip I am explaining some of the intentions behind the project, the importance of the physicality and the use of technology
Marko Križmančić from LARICS Lab examining localisation and control he developed for the “Is this Life?” project
Max Mahieu from TU Delft describing his involvement in building the hardware part of the robot
Video of the Klisab fashion show collaboration
Topics
This complex interactive installation opens up
a set of questions about several topics:
-
Society – for
understanding society as an organism and interrelation between human beings
-
AI – to study
different manifestations of collective intelligence, as one of the possible
types of intelligence, as a subset of artificial intelligence (AI)
- Interaction – to test and implement different ways of interaction, with an emphasis on indirect means of interaction, where the interaction is not immediately obvious or instantly gratifying, as opposed to what we are normally used to expect from digital technologies
- Agency – the presence of the audience is crucial for the system, they insert energy into the system and change its behaviour
- Post-digital materiality – the division between digital and non-digital is blurring, we cannot talk anymore of a clear boundary in our surrounding. We live in a moment when digital technology is so omnipresent and accessible that it is not any more our primary focus itself. The most important aspect of digital technologies becomes the experience that it enables, creating an easier transition between the two.
The title
The
title Is this Life? references Erwin Schrödinger’s book "What
is Life?" (1944), where he introduces the idea of genetic material as
hereditary information, influencing the discovery of DNA. Schrödinger defines
an organism through the role of negentropy and proposes developing a universal
formula of life.
Description of the collaboration
Project development can be divided in to 5 basic segments. These are
disciplines required for the realisation of the whole project:
-
Software
High-level control like localisation and coordination/organisation will be developed by LARICS Lab from the University of Zagreb. For the localisation we will use Pozyx system and for the organisation of the robots, we will use a Boid algorithm following Rainold rules. Low-level control will be done by TU Delft and Hochschule Aalten.
- Electronics
- Mechanics
- Ceramics
Developing the mould and casting the porcelain shells for the outer spheres of the robot are done by Quark-centar for ceramics in Rijeka, Croatia, by Professor Dražen Vitolović and Rino Banko.
- Interaction
After the prototype faze is finished we will scale up the production to 24 robots and additional 6 robots as redundancy, the total of 30 robots will be built. In this phase we will finetune the organization and control and start working on the interaction with the audience. This will be done in collaboration between the TU Delft and LARICS Lab.
Delft design labs are part of TU Delft, specialised in human-centered AI and thus being ideal collaborator for this delicate and very much experimental phase of the project. We will try out several ways of interaction based on adaptive behaviour of swarms. All the interactions will be biologically driven, mimicking complex behaviours of self-organisational systems.
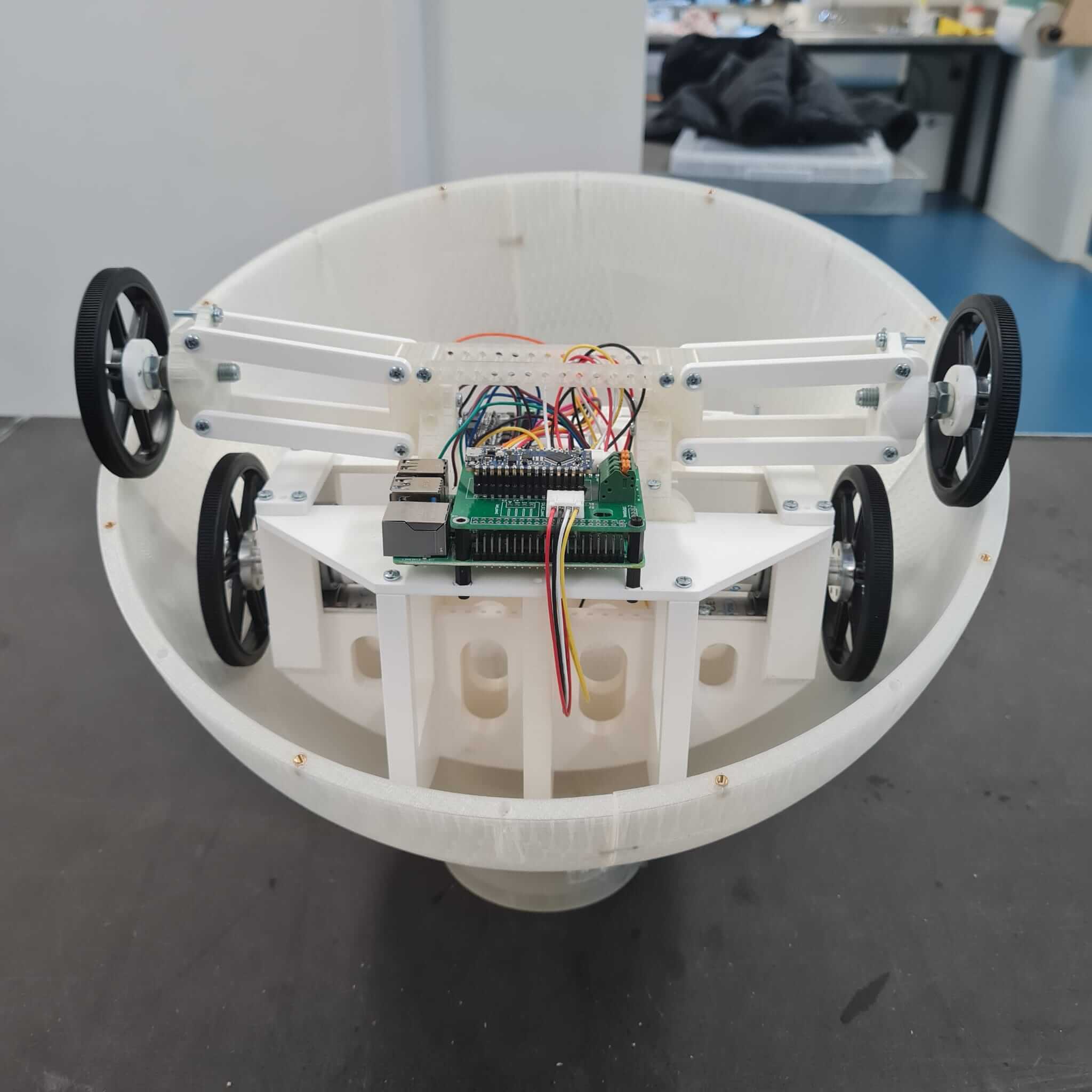


It not only looks great, it sounds great, which means that it has no cracks in the structure and has been baked properly. The firing of the kiln and the cooling program took 12 hours and the maximal temperature was 1120 C.
Conclusion
“Is this Life?” creates a thought-provoking and immersive experience. It highlights the adaptive and symbiotic relationships between humans and technology, encouraging audiences to reflect on their place in an increasingly complex ecosystem populated by both living and non-living entities. By focusing on the experiential and philosophical questions it raises, using advanced technology as a medium to convey these concepts rather than as an end in itself.
Furthermore, the project explores interaction between humans and a non-distinct ‘intelligent’ system that seems to be the physical representation of a black box: elegantly designed as a perfect sphere without features that betray orientation, sensorial capabilities, mechanism of movement, or any technology inside. The robotic spheres allow for unique physical swarm simulations, including a live audience in a public gallery. There, its carefully chosen size creates enough displacement to perform spatial negotiation maneuvers with humans while its physical appearance maintains a very high visual abstraction level.
“Is this Life?” creates a thought-provoking and immersive experience. It highlights the adaptive and symbiotic relationships between humans and technology, encouraging audiences to reflect on their place in an increasingly complex ecosystem populated by both living and non-living entities. By focusing on the experiential and philosophical questions it raises, using advanced technology as a medium to convey these concepts rather than as an end in itself.
Furthermore, the project explores interaction between humans and a non-distinct ‘intelligent’ system that seems to be the physical representation of a black box: elegantly designed as a perfect sphere without features that betray orientation, sensorial capabilities, mechanism of movement, or any technology inside. The robotic spheres allow for unique physical swarm simulations, including a live audience in a public gallery. There, its carefully chosen size creates enough displacement to perform spatial negotiation maneuvers with humans while its physical appearance maintains a very high visual abstraction level.
Link to Crossing parallels residency project page
The first photo is by Karla Juric / @ninetofivestudio